
ژاپن از ربات لوله کاترپیلار برای تعمیر و بازرسی فاضلاب رونمایی کرد
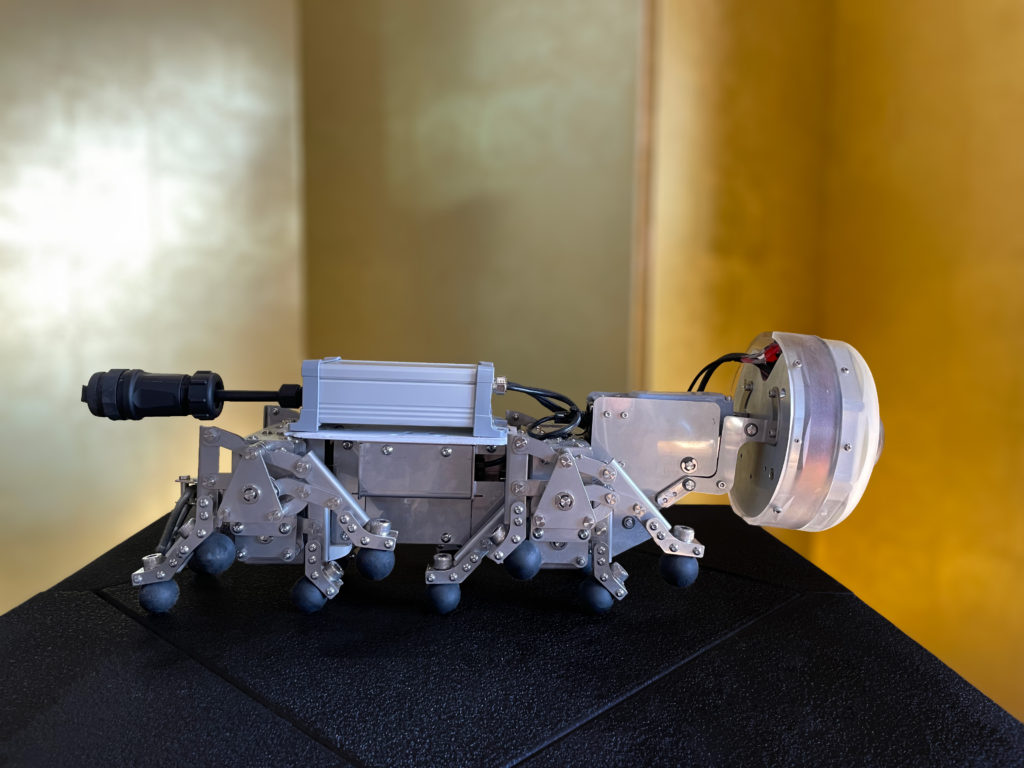
به گزارش گروه دانشگاه خبرگزاری دانشجو، شرکت Tmsuk مستقر در کیوتو (Tmsuk) از توسعه یک ربات جدید بازرسی لوله پا به نام “SPD-X” خبر داده است. ربات جدید میتواند در لولههایی با قطر بیش از ۷.۸۷ اینچ (۲۰ سانتی متر) قرار بگیرد و با استفاده از باتری ۱۶ پایه خود تا ۰.۱۹ مایل در ساعت (۰.۳


به گزارش گروه دانشگاه خبرگزاری دانشجو، شرکت Tmsuk مستقر در کیوتو (Tmsuk) از توسعه یک ربات جدید بازرسی لوله پا به نام “SPD-X” خبر داده است. ربات جدید میتواند در لولههایی با قطر بیش از ۷.۸۷ اینچ (۲۰ سانتی متر) قرار بگیرد و با استفاده از باتری ۱۶ پایه خود تا ۰.۱۹ مایل در ساعت (۰.۳ کیلومتر در ساعت) حرکت کند.
این ربات به طور خاص برای کمک به بازرسی و تعمیر خط لوله توسعه یافته است. این همچنین یک ارتقاء قابل توجه در ربات “SPD۱” این شرکت با ثبات و عملکرد بیشتر است.
برای این منظور، SPD-X کوچکتر، طولانیتر و تقریباً سه برابر سنگینتر از SPD۱ است. حداکثر سرعتی معادل دارد و اکنون کاملاً ضد آب است. SPD-X دوربین بسیار بهبود یافتهای دارد و میتواند محیطهای پیچیده تری مانند ناهماهنگی مفصل لوله یا تجمع رسوب را مدیریت کند.
این دوربین دید ۳۶۰ درجه در ۱۲.۳ را ارائه میدهد که نسبت به ۶۲.۲ درجه SPD۱ پیشرفت بسیار زیادی دارد. نسخه اصلی و جدید بهبود یافته SPD-X دارای یک کنترل از راه دور از طریق یک کنترلر الهام گرفته از پد بازی هستند.
SPD-X: نسل بعدی پیپ باتها
این ربات همچنین میتواند در فضاهای باریک دیگری که انسانها نمیتوانند وارد آنها شوند، به ویژه فضاهای بالقوه خطرناک، استفاده شود. در مقایسه با مدل قبلی خود، SPD-X دارای پایههای پیشرفته تری است و تعداد بیشتری از آنها به آن امکان میدهند تا موانع بیشتری را سریعتر طی کند.
SPD-X به ارتش واقعی دیگر «پایپ باتها» میپیوندد که در حال حاضر در سراسر جهان در حال استفاده یا توسعه هستند. این روباتهای کوچک به انجام کارهای حیاتی کمک میکنند تا خطوط لوله را در بهترین شرایط نگه دارند.
تنها در ایالات متحده، تخمین زده میشود که یک لوله آب اصلی هر دو دقیقه یا بیشتر پاره میشود و در حال حاضر کمتر از شش میلیارد گالن آب تصفیه شده در روز از دست میرود. به طور متعارف، بازرسی و تعمیر مستلزم کار مقدماتی زمانبر و کار فشرده است.
رباتهایی مانند SPD-X میتوانند زمان و پول نقد مورد نیاز برای انجام کارهای بازرسی و تعمیر را به میزان قابل توجهی کاهش دهند.
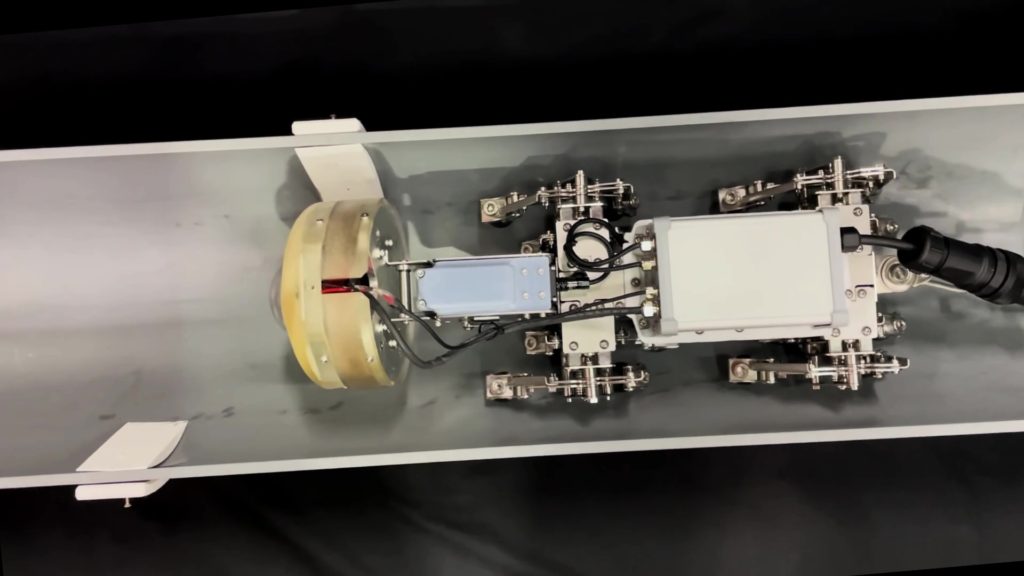
توسعه آن شامل شبیه سازی سه بعدی گسترده برای مشاهده نحوه عملکرد طراحی ربات در محیطهای مختلف است. این شامل پاسخ مورد انتظار آن به تجمع رسوب در یک لوله است.
اینها با آزمایش دنیای واقعی ربات در محیطهای مشابه پیگیری شد. بسیاری از پیشرفتها در آخرین مدل به دنبال بازخورد کاربران SPD۱ در سال ۲۰۲۲ بود.
اینها شامل، اما محدود به توانمندسازی ربات برای کنترل قطر لولههای بزرگتر و کوچکتر و بهبود عملکرد برای انسداد لوله و جریان آب نبودند.